
Technologies
50 years of technology mastery
Our R&D department commits its energy to stretch the limits of the technology. While expressing the results of that activity into solutions that remain open for both the installers as well as the users.
Since 50 years, BEA has been achieving a reputed authority in technologies applied to the domain of detection and receives worldwide recognition as an expert by its peers.
LASER
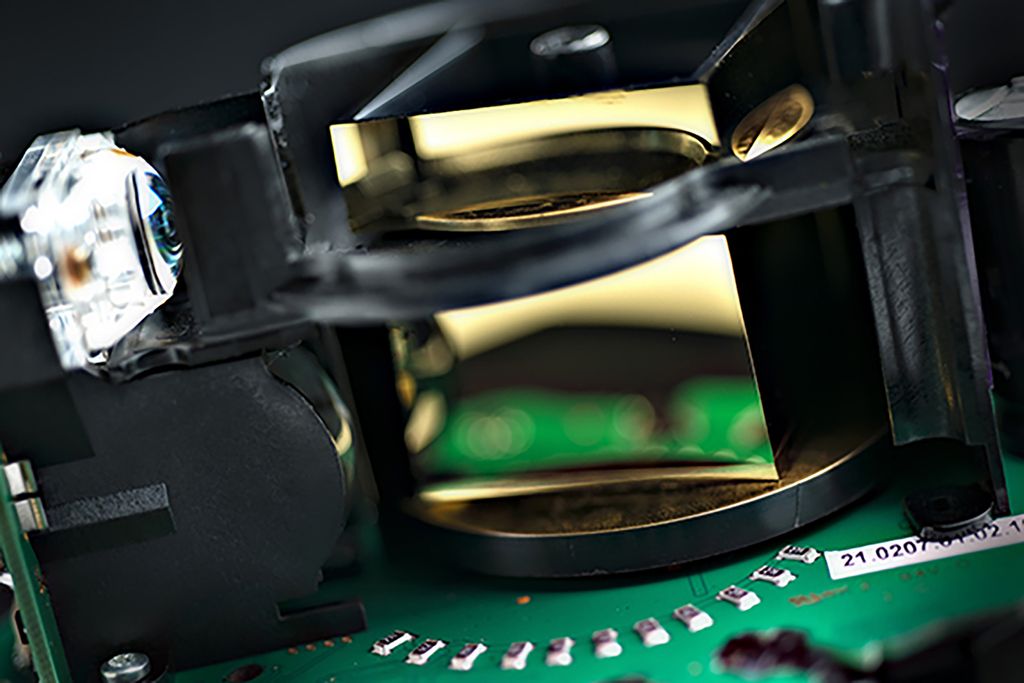
LASER technology works according to the principle of time of flight. The sensor sends an intense light impulse in a defined direction and measures the time until the signal returns. As the speed of light is a constant value (approximately 300.000 km/s), this time is directly proportional to the distance between the sensor and the first object encountered by the light impulse.
As a result, and by sending multiple beams in multiple directions (2D or 3D), the sensor is capable of knowing the exact position of any object in its detection area at any given time.
By analyzing this information over a very short period of time, it is easy to determine the shape, speed, and direction of any object.
LASER technology is the most precise and accurate method used in BEA products and delivers the highest ever level of safety.
-
 LZR®-FLATSCAN 3D SWLearn more
LZR®-FLATSCAN 3D SWLearn more -
 LZR®-I100 /-I110Learn more
LZR®-I100 /-I110Learn more -
 LZR®-WIDESCANLearn more
LZR®-WIDESCANLearn more
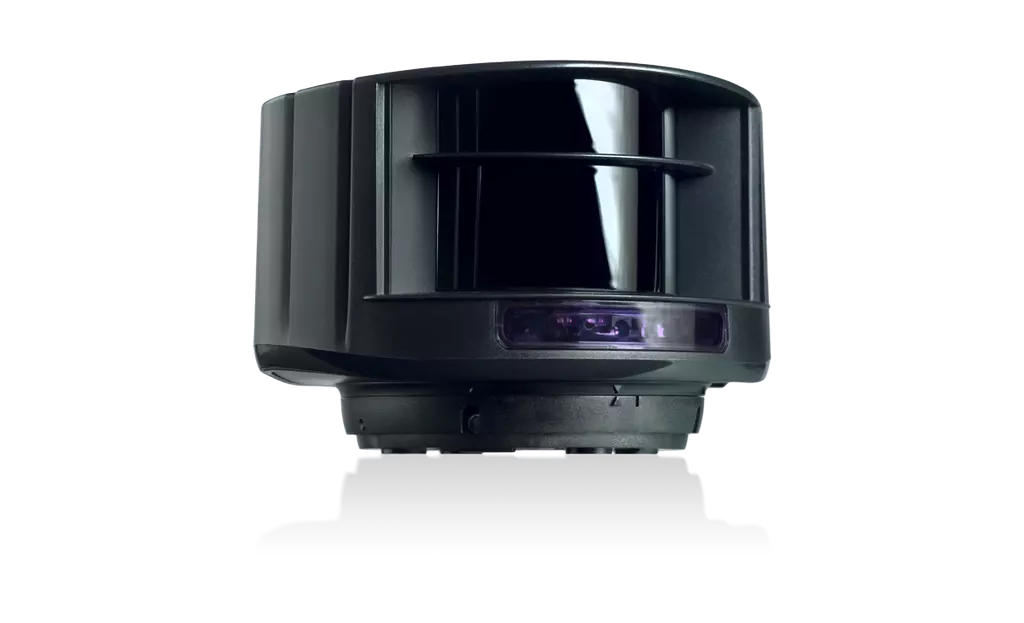
RADAR
Radar technology, also called microwave technology, is based on the Doppler Effect:
the radar sensor continuously emits microwaves with a certain frequency in a defined area. These microwaves are reflected back to the sensor by all of the objects present in its environment.
If the objects in the area do not move, the microwaves come back to the sensor with the same frequency as the initial one. Once a movement occurs in the detection field, the microwaves come back to the sensor with a different frequency and this results in a detection.
Furthermore, this technology can distinguish between an approaching movement (higher frequency) and a departing movement (lower frequency), allowing the sensor to only open the door for an approaching target. This function, known as ‘direction sensing/unidirectionality’, reduces door opening cycles and generates energy savings.
Over the years, radar technology has become the perfect choice for detecting moving objects in a well-defined area.
-
 EAGLE ONELearn more
EAGLE ONELearn more -
 FALCONLearn more
FALCONLearn more -
 MAGIC SWITCH CHROMALearn more
MAGIC SWITCH CHROMALearn more
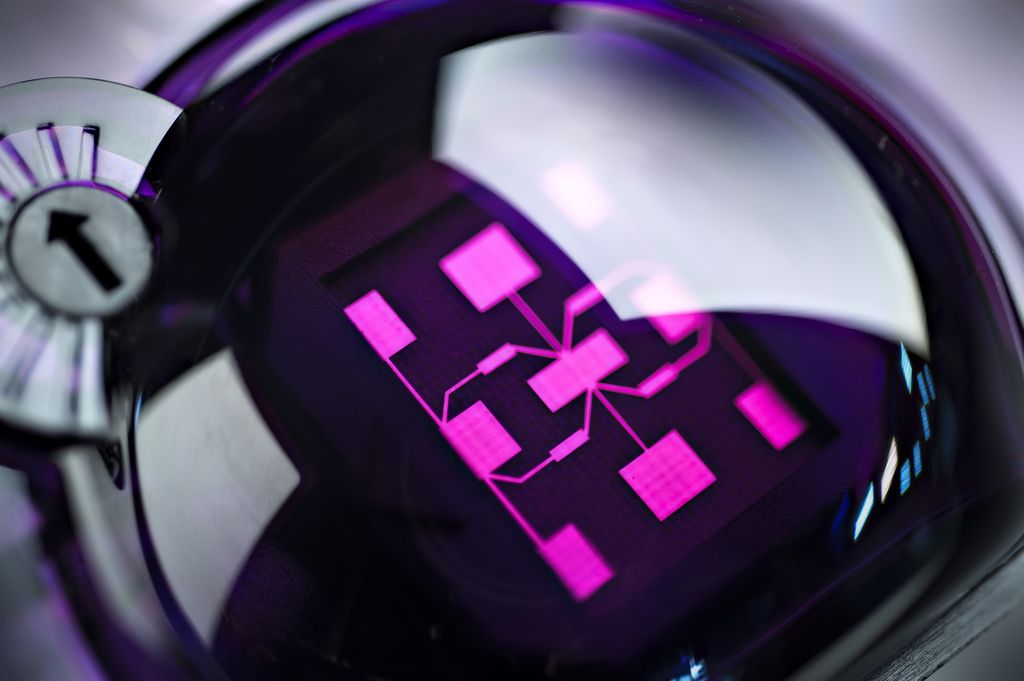
RADAR - Artek inside
BEA started implementing the radar technology 1972 using the horn antenna. In 1996 the EAGLE sensor revolutionised motion detection with its more compact planar antenna. And after 50 years of experience with radar technology, it is now time to go digital with Artek inside.
Many hours of research, development and testing have been invested to create and develop the Artek technology. Thanks to the know-how of our engineers, this active digital antenna takes motion detection to the next level. The robust and sustainable design, cutting edge electronics and software allow for precision, reliability, and more flexibility, setting the new standard for motion detection.
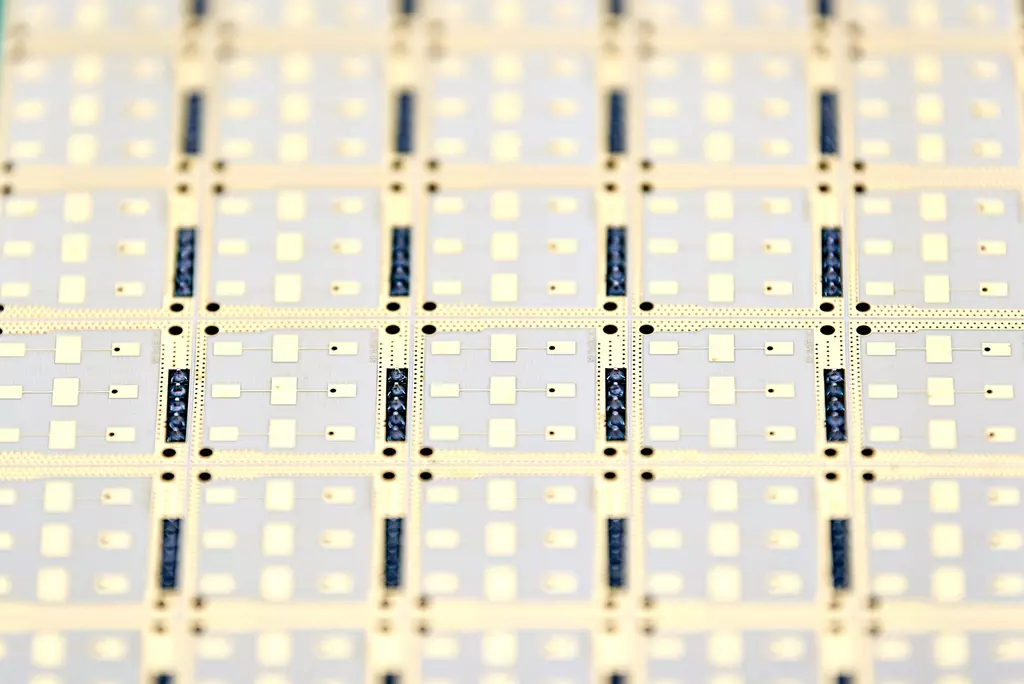
On our in-house production line, state-of-the-art equipment and experienced personnel work together to produce the Artek electronics. This way, we control the whole process from start to finish, which implicates a great sense of mastery and independence. Components are printed on circuit boards with quality checks by camera and the human eye. Less waste, logistics and time delay also contribute to a smooth work process and above all, the well-being of our planet.
ARTEK inside, made by BEA with passion.
Watch our video-
 EAGLE ARTEKLearn more
EAGLE ARTEKLearn more
ACTIVE INFRARED with background analysis
An active infrared sensor is, by definition, a sensor that emits infrared light in a well-defined area and analyzes the reflections that come back.
Background analysis always works with a background (e.g. a sensor shines infrared light on the floor). In this case, the sensor lights up one or more areas and analyzes the energy that returns. Detection is triggered if there is any significant difference when compared to the original picture.
This technology, which is highly sensitive, is the best method for detecting static objects close to a door. It is also often combined with a radar sensor to provide the best option for opening doors (radar) and safeguarding objects (infrared) using a single device.
-
 IXIO-SLearn more
IXIO-SLearn more -
 MILANLearn more
MILANLearn more -
 RS-15Learn more
RS-15Learn more

ACTIVE INFRARED with background suppression
An active infrared sensor is, by definition, a sensor that emits infrared light in a well-defined area and analyzes the reflections that come back.
Background suppression works on the principle of ‘triangulation, in which the sensor calculates the distance to an object by taking into account the distance between the emitter and receiver. The emission angle is already known and the reflection angle becomes the key element as the distance to the object can be calculated according to the position of the reflected spot on the receiver side (a triangle can be drawn when you know one distance and two angles).
This technology, which requires a small uncovered zone on the floor, facilitates the detection of static objects without being influenced by the reflectivity of the background. It is therefore mostly used when the background is likely to change (e.g. sensor is fixed on a moving door panel).
-
 4SAFELearn more
4SAFELearn more -
 1SAFELearn more
1SAFELearn more
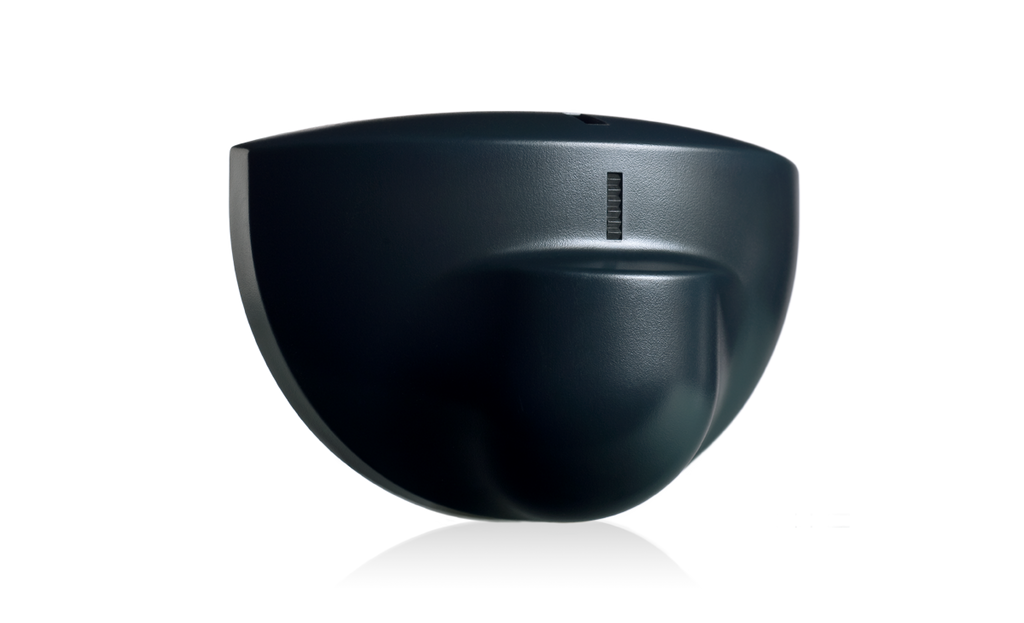
PASSIVE INFRARED
A passive infrared sensor is a sensor that measures the infrared light radiating from objects in its field of view.
Motion or presence is detected when an infrared source with one temperature, such as a human being, passes in front of an infrared source with another temperature, such as the normal environment.
Passive infrared sensors have adjustable detection areas and are rather insensitive to ‘cold’, static objects.
Over the years, passive infrared technology has been increasingly replaced by radar and active infrared technologies to increase detection reliability. Nevertheless, there are still some applications for which passive infrared sensors are well suited.
-
 FLYLearn more
FLYLearn more

INDUCTION LOOPS
Induction loops are based on the following principle:
An electrically conductive loop is installed in the pavement (multiple wires) and connected to a nearby electronic sensor. This sensor transmits energy into the wires and a magnetic field is generated. When a metallic object (vehicle) passes over the loop, the properties of the magnetic field will change (modification of the inductance). This modification is detected by the sensor and the outputs are activated.
The main advantage of this technology is a perfect filtering between metallic objects (e.g. vehicles) and non-metallic objects (e.g. people). Nevertheless, the installation and maintenance of this technology require a lot of effort (loops in the pavement) and an increasing number of alternatives (LASER or AIR based products) are being used by the market.
-
 MATRIXLearn more
MATRIXLearn more
RADIO CONTROL FREQUENCY
Wireless technology uses transmitters and receivers operating on specific radio frequencies. The transmitter applies a radio frequency alternating current to an antenna, which then radiates radio waves. The receiver receives the transmitted frequency and converts the information into a usable form. Radio transmitters and receivers are used for activation.
-
 PUSH PLATESLearn more
PUSH PLATESLearn more -
 EAS RFLearn more
EAS RFLearn more
See all our segments
-
-
Doors & Windows
-
Guidance & Access Control
-
-
-
Doors
-
Gates & Barriers
-
-
-
Autonomous Robots
-
Traffic & Transport Solution
-
Asset Protection
-